
Team Just Tryna Graduate

Joe Campo
Controls and Systems Specialist
Joe was in charge of the majority of the software and overlooked system integration. He is the reason for design decisions which make the software more straightforward. He is interested in pursuing controls and robotics after graduation. His catchphrase is "Just first make it work."
Elon Gordon
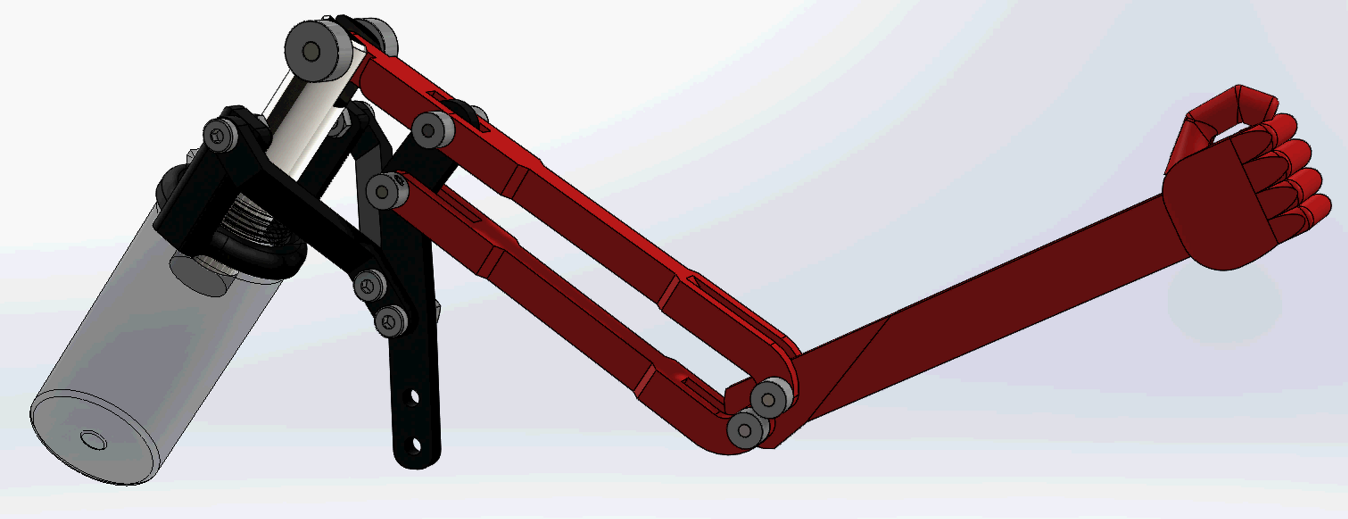
Prototyping Lead
Elon designed a majority of the arm and chest mechanisms and spearheaded the days of prototyping and testing. He specializes in integrating design with manufacturing and assembly. His catchphrase is "Don't worry, I fixed that in the next version."

James Harrison
Platform Engineer/Handiman
James is the leader of development of the platform of the project. He is also known as a general handiman, doing jobs from design to soldering and machining. If something needs to get done, you can trust him to take care of it. His laugh is detectable in a 5 mile radius.

Nikiander Pelari
Signals and Electrical Engineer
Niki takes care of all of the electrons no one else on the team knew what to do with. He developed the human sensing component of the project and was the resident expert on electronics. His catchphrase is "Malaka!"

John Cervone
Logistics and Analytics
John works on MATLAB geometric analysis of systems and gets the team to achieve logistical deliverables. He may be caught fresh from a Tae Kwon Do tournament.
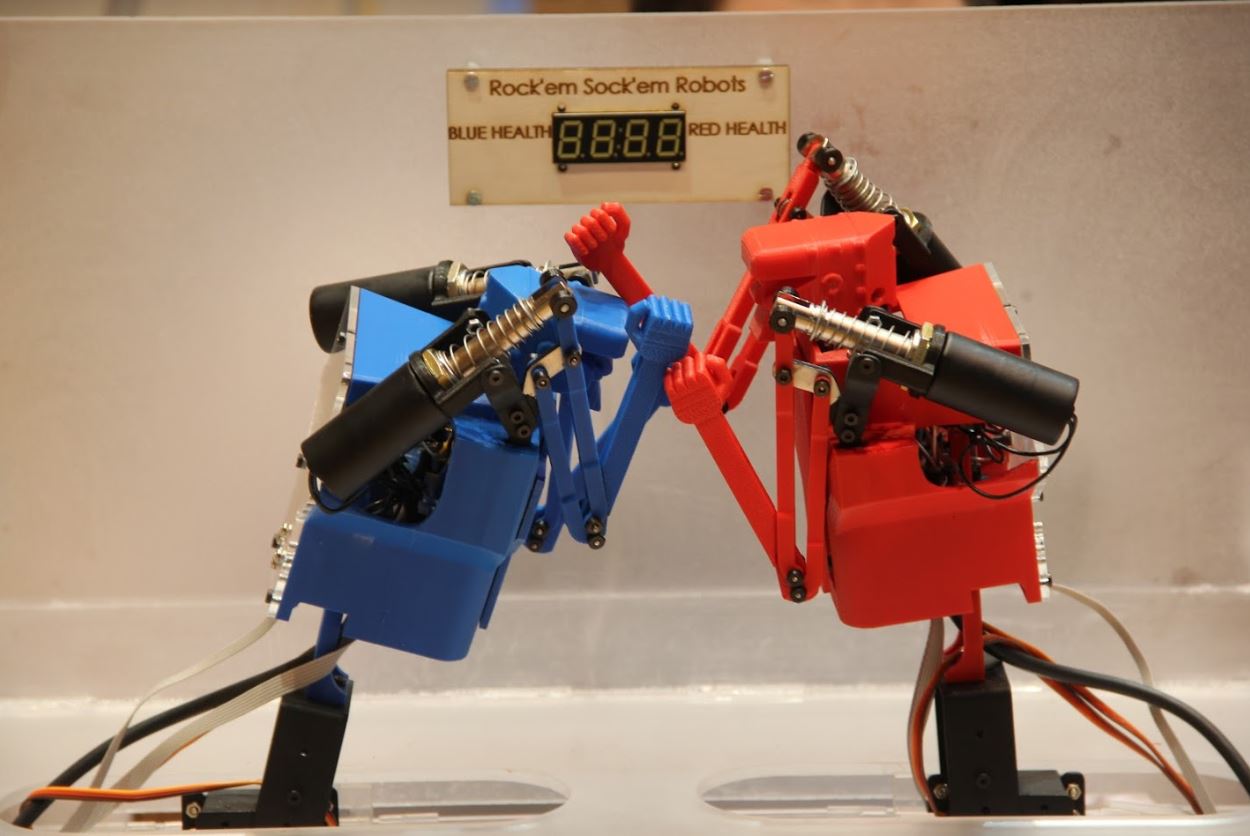
Project Rockem
Reimagining a childhood game
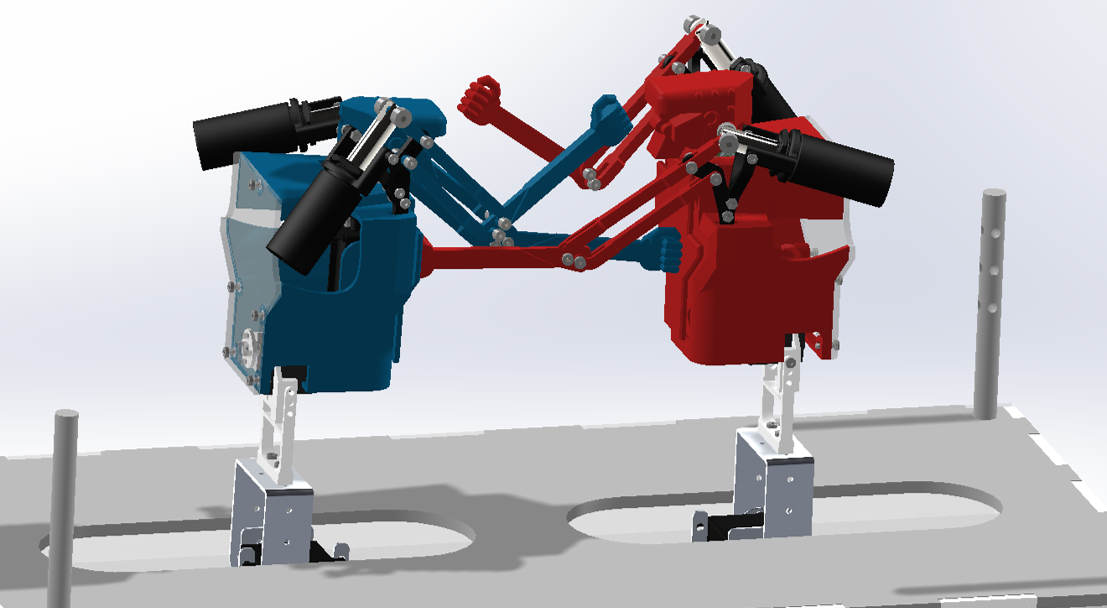
Our project was aimed to do two things: give all of us a chance to push our technical skills on to new heights and to relive a childhood game in a fun and nostalgic way. We wanted to make a fully human-controlled game of rockem sockem robots.
This project is two robots which fight via punching and dodging just like Rockem Sockem Robots, but the control is all managed by harvesting a human player's motions. The gave us chance to make complex mechanical systems, work with a number of actuators, and try our hand at human behavior harvesting. Joe And Niki learned a lot about signal processing and control, and the mechanical team got a chance to tackle the deceptively difficult problem of making two robots that were supposed to hit eachother, but not damage each other in the process. We call it a controlled conflict of robotic workspaces.
The project both turned out to be an excellent learning experience as well as incredibly rewarding to make a toy so nostalgic and also so fun to play! One of our major goals was to have lots of fun working on this project; the end product being a game we play against eachother to test helps a lot!